
Step stick A4988 stepper driver 1A 2A
Green version: Rs =0.1Ω ; current : max 2A;
Red version : Rs =0.2Ω ; current : max 1A.
|
StepStick A4988 stepper motor driver
Packing list 5pcs * A4988 (2A) 5pcs*heat sink
Notice : Green version: Rs =0.1Ω ; current : max 2A; Red version : Rs =0.2Ω ; current : max 1A.
The current calculation : i = vref /0.8 Potentiometer has three pins, the voltage Vref is with a multimeter test for the 4988 direction of the pin, the current can be adjusted by potentiometer. It will increase clockwise, oppositely , reduce counterclockwise.
Advantage : 1.High quality 2OZ copper PCB replaces using cheaper 1OZ PCB. 2.Products have bee tested one by one;and excellent work. 3.Free aluminium heat-sink. 4.Solder overgild needles and newest chip.
Parameters: Size: 1.5mmX2mm (for RAMPS, ultimaker or other compatible boards) Driver current: 2A (it is best to install the heat sink ) Microstep: 1,1 / 2,1 / 4,1 / 8,1 / 16 Manufacturing process: made by SMT , higher yield, excellent stability.
Usage on : 1. 3Dprinter ,cnc , carving machine, etc . 2. Support 3D printer with Prusa Mendel, ultimaker, printbot, makerbot etc . 3. Refer to Arduino code , directly drive motor.
Features : 1. Suitable for stepper motor driver below 8V ~35V, 2A 2. Simple microstep and direction control interface 3. Can adjust max current output by controlling potentiometer to get higher microstep 4. Detection and selection on attenuation mode of automatic current. 5. Thermal shutdown circuit, undervoltage lockout, crossover current protection 6. Good protection on ground and load short circuit
If use A4988 on 3Dprinter , there needs a complete circuit module: Arduino 2560 CPU core-board Ultimaker v1.5.7 main control board A4988 stepper driver motor module (single head :4pcs ; double head :5pcs ) LCD controller (or SD card off-line printing)
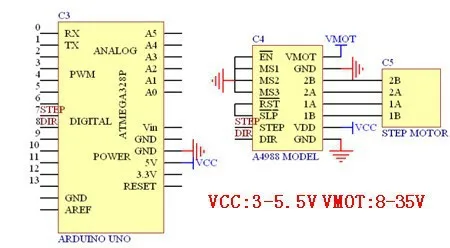
Control A4988 directly by using Arduino : You can operate A4988 by using UNO to control STEP and DIR
The relationship between MS1, MS2, MS3:
Test code : int dirPin = 8; int stepperPin = 7;
void setup() {pinMode(dirPin, OUTPUT);pinMode(stepperPin, OUTPUT);} void step(boolean dir,int steps) {digitalWrite(dirPin,dir); delay(50); for(int i=0;i<steps;i++) {digitalWrite(stepperPin, HIGH); delayMicroseconds(800); digitalWrite(stepperPin, LOW); delayMicroseconds(800); }} void loop()
{step(true,1600); delay(500); step(false,1600*5); delay(500);} |



| Brands | 1.75mm |
|---|

Sign In
Create New Account